
日前,中国联通与宝马集团在北京签署了《宝马互联驾驶下一代移动通信业务合作协议》。双方将计划组建联合实验室,就5G移动通讯技术、eUICC、V2X等前沿技术开展深入研究;9月16日,中国移动5G自动驾驶峰会在北京举行,首条5G自动驾驶车辆测试道路也已经正式开放。

5G虽然离商用还有一段距离,但各个车企早已开始了布局。内燃机在汽车上发展了一百多年,现已日臻成熟。汽车的未来,无疑要步入新能源和自动驾驶的时代。根据世界经济论坛的分析,到2026年,至少将会有10%的汽车是无人驾驶的。而想实现自动驾驶,5G则是基础。
什么是5G?
5G简单地说就是第五代通信技术,通信技术归根到底其实就两种——有线通信和无线通信。其中有线通信通过介质传播,无线通信则使用电磁波进行传播,电波和光波都属于电磁波。

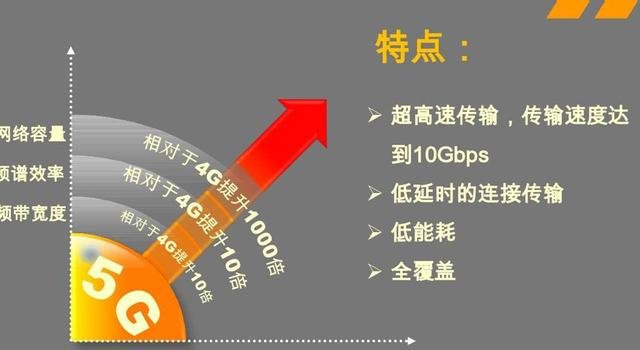
在真空中,电磁波的波速为c,等于波长λ和频率f的乘积。频率f越高,能使用的频率资源就越丰富,资源越丰富,就可以实现更高的传输速率。例如“GSM900”、“CDMA2000”,其含义就是900Mhz的GSM,和工作频段在2000Mhz的CDMA。而5G的频率范围可以达到24Ghz以上。根据c=λf的公式可以得出,f越高,其波长λ越短,超高的频率直接让5G的波长达到了毫米级,带来的特点就是极高的传输速度和极低的延迟,而负面效果就是传输距离缩短,覆盖能力差,穿透效果差。

随着时代的发展,各种信息爆炸式的增长,人们显然需要更快速的信息传输能力,物与物之间亟待互联。5G虽然有一定的短板,但可以通过安装大量的微基站来扩大覆盖范围,弥补穿透能力差的缺陷。
没有5G的自动驾驶
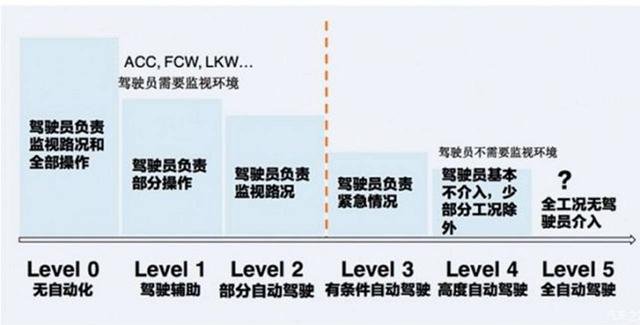
自动驾驶分为从L0-L5六个级别,最高级别L5意味着全自动驾驶、完全自动化,不需要驾驶员。实现自动驾驶的基本原理,我们可以分成三个方面,分别是:传感器、数据融合、100%安全的决策。
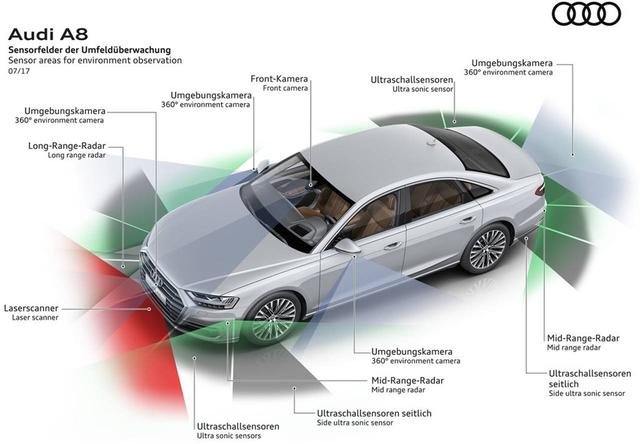
车辆上的传感器我们并不陌生,自适应巡航、主动刹车、车道保持等都是通过各种各样的传感器实现的,主要有图像传感器、毫米波雷达、激光雷达等。这些丰富的传感器构成了汽车的“眼睛”,而数据融合就是让以上这些传感器收集到的数据进行筛选、分析、合成,协同合作,从而更好的判断汽车所面临的道路情况。这些传感器是优势互补的,比如图像传感器有分辨颜色的能力,可以判断路标、指示牌等,但是在恶劣天气中辨别能力就会下降,而雷达在判断距离、穿透雨雾方面就很有优势。
收集数据、对数据进行融合处理之后,就要做出100%的安全性策略。然而我们上述说的这一切都是通过本地端来实现的,并不具备预判能力,因为车跟车之间、车跟环境之间是没有沟通的,没有信息交换。所以这种方式有很多局限性,比如没有办法选择合理的路线,无法预知一些突发情况,100%的安全就难以实现。
有了5G之后的自动驾驶
为了让车跟车、车跟环境之间实现信息交换,那就需要C-V2X的支持,它是基于蜂窝网络的车联网技术。有了这项技术的加持,车辆就是可以通过通信信道感知到彼此的状态,可以检测隐藏的威胁。车与车互联之后,人们甚至可以通过算法和规则来实现有秩序的行驶状态。
我们举一个例子,假如弯道过后有静止在道路上的车辆,汽车本地端通过摄像头、雷达等传感器,是无法感知到的。转过弯道发现之后,即便是立即做出决策和行动,那也很难避免事故的发生。而V2X技术则可以通过通信网络共享信息,前方车辆停下的那一刻,就已经被一定范围内的其它车辆所感知到,从而可以提前做出安全决策。
众所周知,当下的3G、4G网络都是存在“延迟“的。而万物互联的时代,物体之间在进行大量数据交换的同时,本身还会处于高速移动之中,与互联网的“尽力而为”不同,在自动驾驶中,零点几秒的延迟,或者几米的定位不准确,就有可能酿成事故的发生。5G的到来,使得大量数据高速传输成为现实,其低延时的特性,可以使信息更加准确、及时。
而将会伴随5G而来的网络切片技术,则可以划分出多个虚拟网络,每个虚拟网络可以根据场景需求,比如延时、带宽、安全性等来划分,在网络拥堵的地区(比如商圈、演唱会附近等),网络切片技术可以优先保障汽车通信的高速率和低延时。
另外,5G核心网络控制层面和数据层面是完全分离的,数据计算中心将会更加灵活,由现在“中央处理”分散到边缘中,可以直接部署到接近数据源的地方,很多数据将不必经过网络传输到云端处理。这样带来两个好处,首先是网络负担下降,延时降低;另一方面,数据的安全性和隐私性也将得到提高。
未来,基站、路边单元等更靠近车辆的地方,都可以部署车联网的边缘计算。虽然这样的设定,会出现频繁切换网络的情况,但通过C-RAN架构,可以大幅度降低对自动驾驶能力的负面影响,同时还可降低运营商的维护成本。
最后:随着5G的到来,可以使得曾经的想象变成可能。5G不仅会推动自动驾驶的发展,更能为整个交通生态圈、城市规划带来重大影响,万物互联的世界似乎就在眼前了。
